
计算机图形学基础(2)——变换
上一篇文章我们介绍了计算机图形学中的线性代数基础,包括:点、向量、矩阵等。本文,我们将介绍向量和矩阵的进一步应用——变换。
概述
计算机图形学中,我们可能会对图形进行各种变换(Transform),如:
- 缩放(Scale)
- 平移(Transation)
- 旋转(Rotation)
- 切变(Shear)
2D 变换
首先,我们来介绍一下 2D 变换,以便了解变换是如何通过矩阵变换来实现的。
缩放变换
对于缩放变换,它主要包含两种:等比例缩放、非等比缩放。
等比例缩放
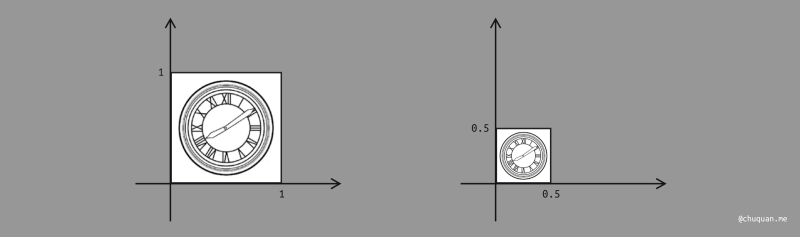
上图所示,为等比例缩放的示意图。根据等比例缩放的规则,我们可以根据缩放前 \(x\) 和 \(y\) 的值,得到一组关系式,如下所示。
\[\begin{aligned} x' =& sx \\ y' =& sy \\ \end{aligned}\]根据此关系式,我们可以进一步推导出缩放矩阵及关系式,如下所示。
\[\begin{aligned} \left( \begin{matrix} x' \\ y' \end{matrix} \right) = \left( \begin{matrix} s & 0 \\ 0 & s \\ \end{matrix} \right) \left( \begin{matrix} x \\ y \end{matrix} \right) \end{aligned}\]非等比缩放
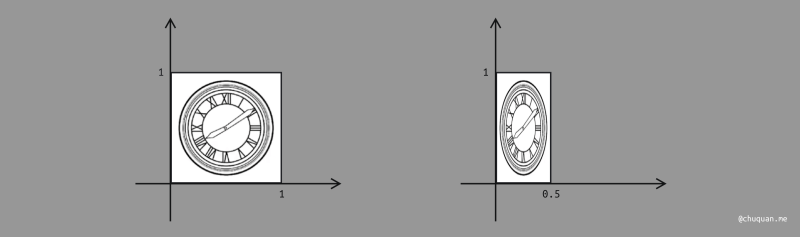
上图所示,为非等比缩放的示意图。根据非比缩放的规则,我们可以根据缩放前 \(x\) 和 \(y\) 的值,得到另一组关系式,如下所示。
\[\begin{aligned} x' =& s_xx \\ y' =& s_yy \\ \end{aligned}\]根据此关系式,我们可以进一步推导出缩放矩阵及关系式,如下所示。对比一下,非等比缩放与等比例缩放的关系式非常相似。
\[\begin{aligned} \left( \begin{matrix} x' \\ y' \\ \end{matrix} \right) = \left( \begin{matrix} s_x & 0 \\ 0 & s_y \\ \end{matrix} \right) \left( \begin{matrix} x \\ y \\ \end{matrix} \right) \end{aligned}\]镜像变换
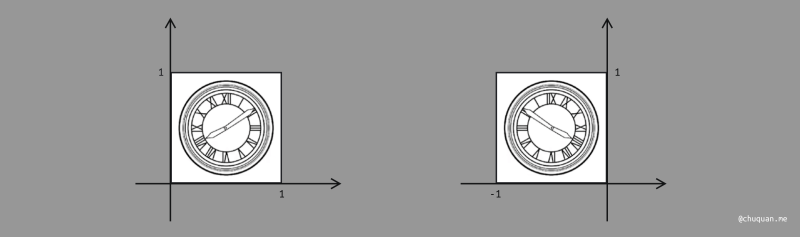
上图所示,为镜像变换的示意图。我们可以根据原始的 \(x\) 和 \(y\) 的值,得到一组关系式,如下所示。
\[\begin{aligned} x' =& -x \\ y' =& y \\ \end{aligned}\]根据此关系式,我们可以进一步推导出镜像矩阵及关系式,如下所示。本质上,镜像变换是一种特殊的缩放变换。
\[\begin{aligned} \left( \begin{matrix} x' \\ y' \\ \end{matrix} \right) = \left( \begin{matrix} -1 & 0 \\ 0 & 1 \\ \end{matrix} \right) \left( \begin{matrix} x \\ y \end{matrix} \right) \end{aligned}\]切变变换
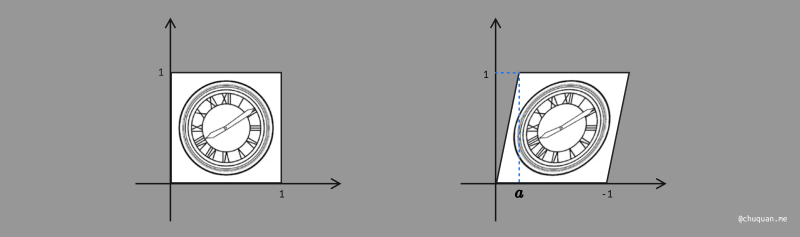
上图所示,为切变变换的示意图。切变变换相对复杂一点,其 \(y\) 坐标值与 \(x\) 坐标值成一个比例关系。不过,我们仍然可以根据原始的 \(x\) 和 \(y\) 的值,得到一组关系式,如下所示。
\[\begin{aligned} x' =& x + ay \\ y' =& y \\ \end{aligned}\]根据此关系式,我们可以进一步推导出镜像矩阵及关系式,如下所示。本质上,镜像变换是一种特殊的缩放变换。
\[\begin{aligned} \left( \begin{matrix} x' \\ y' \\ \end{matrix} \right) = \left( \begin{matrix} 1 & a \\ 0 & 1 \\ \end{matrix} \right) \left( \begin{matrix} x \\ y \\ \end{matrix} \right) \end{aligned}\]旋转变换
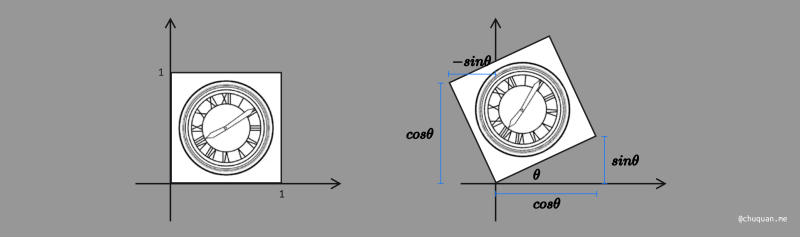
上图所示,为旋转变换的示意图。旋转变换的坐标推导需要借助三角函数,最终可得到如下一组关系式。
\[\begin{aligned} x' = cos{\theta}x - sin{\theta}y \\ y' = sin{\theta}x + cos{\theta}y \\ \end{aligned}\]根据此关系式,我们可以进一步推导出旋转矩阵及关系式,如下所示。
\[\begin{aligned} \left( \begin{matrix} x' \\ y' \\ \end{matrix} \right) = \left( \begin{matrix} cos\theta & -sin\theta \\ sin\theta & cos\theta \\ \end{matrix} \right) \left( \begin{matrix} x \\ y \\ \end{matrix} \right) \end{aligned}\]平移变换
截止目前位置,所有的的变换都可以通过推导得出一个变换矩阵,以此矩阵乘以任意点(以矩阵表示),都可以得到转换后的点(以矩阵表示),符合线性变换。
下面,我们来看一下比较特殊的平移变换。
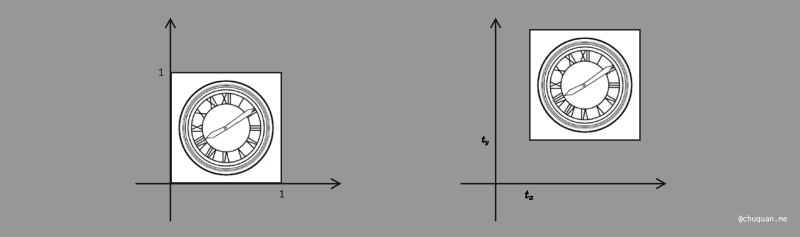
上图所示,为平移变换的示意图,同样,我们也可以可得到如下一组关系式。
\[\begin{aligned} x' = x + t_x \\ y' = y + t_y \\ \end{aligned}\]但是,我们进一步推导,得到的关系式与之前的变换不同,它有额外的偏移量,不符合线性变换,如下所示。
\[\begin{aligned} \left( \begin{matrix} x' \\ y' \\ \end{matrix} \right) = \left( \begin{matrix} 1 & 0 \\ 0 & 1 \\ \end{matrix} \right) \left( \begin{matrix} x \\ y \\ \end{matrix} \right) + \left( \begin{matrix} t_x \\ t_y \\ \end{matrix} \right) \end{aligned}\]我们总是希望能使用一个统一的关系式来描述各种变换,然而,平移变换打破了我们的美好预期。那么该如何解决呢?为此,我们引入了齐次坐标。
齐次坐标
为了能够统一表示所有变换,我们引入了 齐次坐标(Homogenous Coordinates)。这里的核心思想是为每一个点或向量添加一个额外的 \(w\) 坐标。
\[\begin{aligned} 2D 点的齐次坐标表示: \left( \begin{matrix} x \\ y \\ 1 \end{matrix} \right) \\ \\ 2D 向量的齐次坐标表示: \left( \begin{matrix} x \\ y \\ 0 \\ \end{matrix} \right) \end{aligned}\]此时,我们再来尝试推导平移变换矩阵以及其关系式,可以得到如下所示内容。很显然,原来关系式中的偏移量没有了。
\[\begin{aligned} \left( \begin{matrix} x' \\ y' \\ w' \\ \end{matrix} \right) = \left( \begin{matrix} 1 & 0 & t_x \\ 0 & 1 & t_y \\ 0 & 0 & 1 \\ \end{matrix} \right) \left( \begin{matrix} x \\ y \\ 1 \\ \end{matrix} \right) = \left( \begin{matrix} x+t_x \\ y+t_y \\ 1 \\ \end{matrix} \right) \end{aligned}\]仿射变换与线性变换
我们将线性变换和平移变换的组合,称为 仿射变换(Affine Transform),如下所示。在未引入齐次坐标之前,我们推导出来的平移变换就是一种仿射变换。
\[\begin{aligned} \left( \begin{matrix} x' \\ y' \\ \end{matrix} \right) = \left( \begin{matrix} a & b \\ c & d \\ \end{matrix} \right) \left( \begin{matrix} x \\ y \\ \end{matrix} \right) + \left( \begin{matrix} t_x \\ t_y \\ \end{matrix} \right) \end{aligned}\]当引入齐次坐标之后,所有的变换都可以统一使用线性变换来表示,如下所示。
\[\begin{aligned} \left( \begin{matrix} x' \\ y' \\ 1 \\ \end{matrix} \right) = \left( \begin{matrix} a & b & t_x \\ c & d & t_y \\ 0 & 0 & 1 \\ \end{matrix} \right) \left( \begin{matrix} x \\ y \\ 1 \\ \end{matrix} \right) \end{aligned}\]如下所示,是引入齐次坐标后,缩放变换,旋转变换,平移变换所对应的变换矩阵。
\[\begin{aligned} 缩放变换:& S(s_x, s_y) = \left( \begin{matrix} s_x & 0 & 0 \\ 0 & s_y & 0 \\ 0 & 0 & 1 \\ \end{matrix} \right) \\ \\ 旋转变换:& R(\alpha) = \left( \begin{matrix} cos\alpha & -sin\alpha & 0 \\ sin\alpha & cos\alpha & 0 \\ 0 & 0 & 1 \\ \end{matrix} \right) \\ \\ 平移变换:& T(t_x, t_y) = \left( \begin{matrix} 1 & 0 & t_x \\ 0 & 1 & t_y \\ 0 & 0 & 1 \\ \end{matrix} \right) \end{aligned}\]逆变换
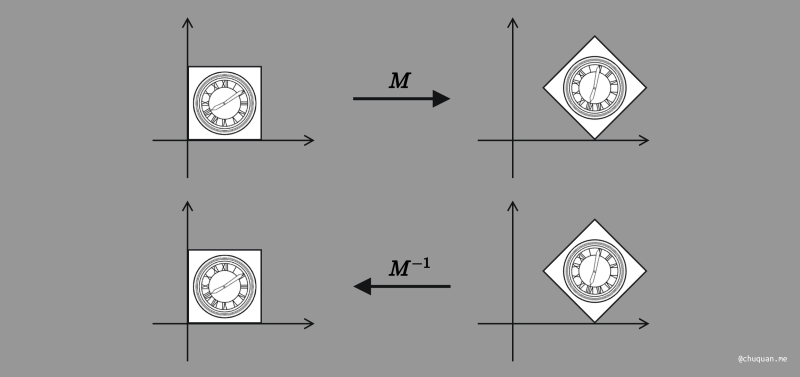
我们将所有的反向变换都称为 逆变换(Inverse Transform),比如:我们将从 A 平移到 B 称为平移变换,那么从 B 平移到 A 则可称为逆变换,其他的缩放变换、旋转变换同样如此。
上一节,我们引入了齐次坐标后,所有的变换都可以转换成线性变换,其中以 \(M\) 为变换矩阵。而这些变换的逆变换,同样可以使用线性变换来表示,并以 \(M\) 的逆矩阵 \(M^{-1}\) 为变换矩阵。
组合变换
在真实情况下,我们遇到的变换大多数都是组合变换,也就是同时包含了缩放、旋转、平移等多种变换。
多种变换组合时,变换的顺序其实是非常重要的,我们以如下一个例子来进行介绍。
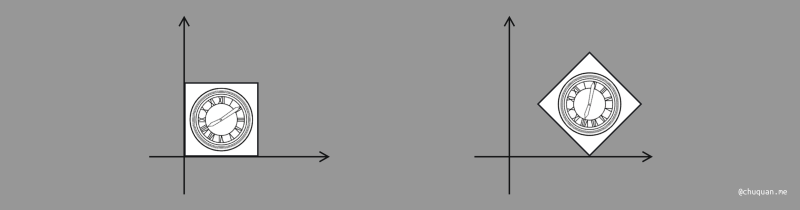
对于上面这种变换,如果我们先平移,再旋转,那么最终会变成如下所示的。这里的根本原因在于旋转变换时,仍然是以坐标原点为锚点进行旋转。
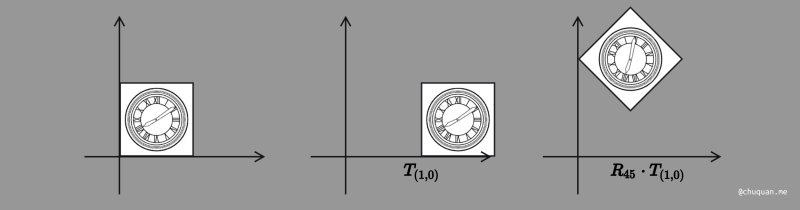
对此,正确的顺序应该是先旋转,后平移,这样才能达到预期的效果。

不同的顺序,矩阵变换的结果完全不同。前一篇文章我们提到过矩阵乘法不符合交换律,从这一点其实也能够解释这个现象。
在实际开发中,遇到这种类似的情况,我们一般都会先将目标平移至原点,然后进行各种其他变换,然后再通过逆变换平移回去。
3D 变换
关于 3D 变换,本质上与 2D 变换一样,只不过在矩阵表示上多了一个维度而已。
当我们引入齐次坐标之后,3D 的点和向量可以采用如下方式表示。
\[\begin{aligned} 3D点的齐次坐标表示:& \left( \begin{matrix} x \\ y \\ z \\ 1 \\ \end{matrix} \right) \\ \\ 3D向量的齐次坐标表示:& \left( \begin{matrix} x \\ y \\ z \\ 0 \\ \end{matrix} \right) \end{aligned}\]与此对应,3D 变换的矩阵变换关系式为如下所示。
\[\begin{aligned} \left( \begin{matrix} x' \\ y' \\ z' \\ 1 \\ \end{matrix} \right) = \left( \begin{matrix} a & b & c & t_x \\ d & e & f & t_y \\ g & h & i & t_z \\ 0 & 0 & 0 &1 \\ \end{matrix} \right) \left( \begin{matrix} x \\ y \\ z \\ 1 \\ \end{matrix} \right) \end{aligned}\]缩放变换
如下所示,为 3D 空间中的缩放变换的变换矩阵的定义。
\[\begin{aligned} S(s_x, s_y, s_z) = \left( \begin{matrix} s_x & 0 & 0 & 0 \\ 0 & s_y & 0 & 0 \\ 0 & 0 & s_z & 0 \\ 0 & 0 & 0 & 1 \\ \end{matrix} \right) \end{aligned}\]平移变换
如下所示,为 3D 空间中的平移变换的变换矩阵的定义。
\[\begin{aligned} T(t_x, t_y, t_z) = \left( \begin{matrix} 1 & 0 & 0 & t_x \\ 0 & 1 & 0 & t_y \\ 0 & 0 & 1 & t_z \\ 0 & 0 & 0 & 1 \\ \end{matrix} \right) \end{aligned}\]旋转变换
如下所示,为 3D 空间中的旋转变换的变换矩阵的定义,沿着不同的轴旋转,变换矩阵的定义也有所不同。
\[\begin{aligned} R_x(\alpha) = \left( \begin{matrix} 1 & 0 & 0 & 0 \\ 0 & cos\alpha & -sin\alpha & 0 \\ 0 & sin\alpha & cos\alpha & 0 \\ 0 & 0 & 0 & 1 \\ \end{matrix} \right) \\ \\ R_y(\alpha) = \left( \begin{matrix} cos\alpha & 0 & sin\alpha & 0 \\ 0 & 1 & 0 & 0 \\ -sin\alpha & 0 & cos\alpha & 0 \\ 0 & 0 & 0 & 1 \\ \end{matrix} \right) \\ \\ R_z(\alpha) = \left( \begin{matrix} cos\alpha & -sin\alpha & 0 & 0 \\ sin\alpha & cos\alpha & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \\ \end{matrix} \right) \end{aligned}\]总结
本文我们简单梳理了一下缩放、旋转、平移几种变换对应的矩阵关系式。其中,平移变换比较特殊,为了能够统一关系式,我们引入了齐次坐标,在点、向量的矩阵表示中增加了一个维度。然后,我们介绍了一下在组合变换中变换顺序的重要性。最后,我们简单总结了 3D 变换的矩阵关系式。
参考
- 《GAMES 101》
- 《计算机图形学入门:3D渲染指南》