
深入理解 Linux Ext 文件系统设计原理
硬盘格式化
我们知道,一个硬盘必须要经过格式化之后才能使用。那么,格式化到底做了什么呢?
本质上,硬盘格式化可以分为两个步骤,分别是:
- 低级格式化,或称 物理格式化。
- 高级格式化,或称 逻辑格式化。
低级格式化
在 《计算机那些事(1)——硬盘》 一文中,我们介绍了硬盘的两种寻址方式,分别是:
- CHS 寻址方式:由柱面数(Cylinders)、磁头数(Headers)、扇区数(Sectors)组成 3D 参数,简称 CHS 寻址方式,硬盘容量相对较小。如传统的机械硬盘(Hard Disk Drive,HDD)。
- LBA 寻址方式:线性寻址,以逻辑区块为单位进行寻址,全称为 Logic Block Address(即扇区的逻辑块地址),硬盘容量相对较大。如固态硬盘(Solid State Disk,SSD)
对于 CHS 硬盘,低级格式化会对硬盘进行划分柱面、磁道、扇区的操作,也称为 扇区初始化。一般由硬盘制造商进行低级格式化。
对于 LBA 硬盘,并不存在低级格式化,因为 LBA 寻址的硬盘使用集成电路替代物理旋转磁盘,主要由主控和闪存芯片组成。
低级格式化完成后,硬盘控制器即可使用格式化的结果。
高级格式化
相对而言,低级格式化是在硬件层面进行初始化,而高级格式化则是在软件层面进行初始化。
高级格式化一般会有两个步骤:
- 硬盘分区初始化:在硬盘的特定区域写入特定的数据,即重写分区表。关于硬盘分区的细节,可以阅读 《计算机那些事(1)——硬盘》。
- 文件系统初始化:根据用户选定的文件系统(如:FAT、NTFS、EXT2、EXT3 等),在特定分区中规划一系列表结构进行逻辑区块管理等。
通常,一个硬盘可以被划分为多个分区。传统的硬盘,每个分区只能初始化一种文件系统。现代的 LVM 与 RAID 技术则能够支持将一个分区格式化为多个文件系统,也支持将多个分区合并成一个文件系统。
软硬件映射
在硬件层面,对于 CHS 硬盘,最小的物理存储单元是扇区,大小为 512 byte;对于 LBA 硬盘,最小的物理存储单元是闪存(本质是晶体管),大小为 1 bit。
在软件层面,为了与操作系统的页大小对齐,文件系统定义的逻辑区块大小一般为 1K、2K 或 4K。
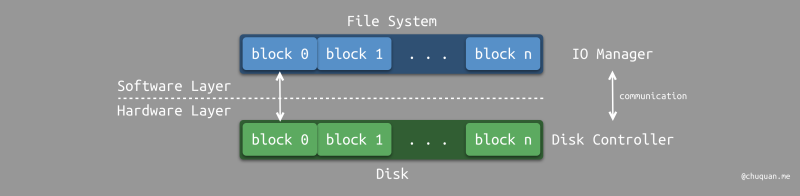
下图所示,为文件系统逻辑区块与硬盘物理区块之间的映射关系。对于 CHS 硬盘,一个逻辑区块所对应的物理区块可能由多个扇区组成。对于 LBA 硬盘,一个逻辑区块则对应一片集成电路存储单元。
在通信时,首先由文件系统的 I/O 管理器将逻辑区块转换成物理区块地址,然后由硬盘控制器根据物理区块(扇区)地址,进行数据读写。
文件系统类型
常见的文件系统类型非常多,比如:
- CentOS 5/6 默认使用 ext2/ext3/ext4
- CentOS 7 默认使用 xfs
- Windows 默认使用 NTFS
- MacOS、iOS、watchOS 默认使用 APFS(曾经使用 HFS)
虽然文件系统的种类很多,但是它们的底层实现大同小异。本文,我们来聊一聊 Linux 系统下的默认文件系统——Ext 文件系统族,举一反三,从而来理解文件系统的底层设计。
文件系统结构
以 Linux 经典的 Ext2 文件系统进行分析,其整体结构如下图所示。
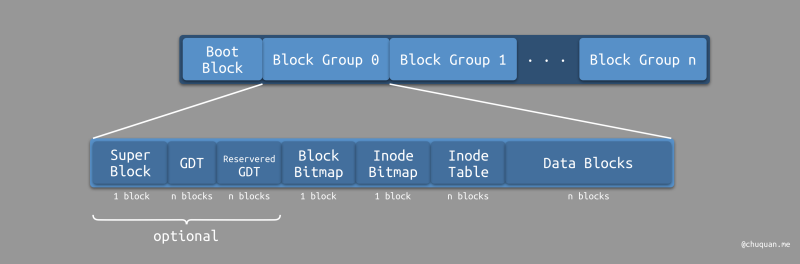
从宏观角度来看,文件系统将硬盘分为两部分:
- 引导区块(Boot Block)
- 区块组(Block Groups)
Boot Block
引导区块是分区的第一个区块,当然,并不是所有分区都有引导区块,只有安装了操作系统的主分区和逻辑分区才有引导区块。
引导区块存储了 Boot Loader,当系统加电启动时,Boot Loader 会被引导装载并执行,从而最终启动操作系统。
Block Groups
文件系统的另一主要组成是区块组,ext2 文件系统包含多个区块组,那么为什么要划分那么多区块组呢?事实上,如果直接管理逻辑区块,逻辑区块的数量是非常庞大的,难以管理,因此为了简化,划分出了区块组,从而进行分级管理。

上图所示,区块组内部又可以分成多个部分,分别是:
- 超级区块(Super Block)
- 组描述符表(Group Descriptor Table,GDT)
- 区块位图(Block Bitmap)
- 索引节点位图(Inode Bitmap)
- 索引节点表(Inode Table)
- 数据区块(Data Blocks)
注意
区块组的 “区块” 对应的文件系统的逻辑区块。区块组中的各个组成部分都使用 “区块” 作为载体进行存储。
下面,我们将分别介绍区块组的各个组成部分。
Block & Inode
在介绍区块组的各个组成部分之前,我们先来了解一下 Block 和 Inode。
Block
Block 主要用于 存储文件的内容数据。不同大小的 Block 使得文件系统能够支持的最大容量和最大单一文件大小各不相同,其限制如下所示:
| Block size | 1KB | 2KB | 4KB |
|---|---|---|---|
| 最大单一文件限制 | 16GB | 256GB | 2TB |
| 最大文件系统容量 | 2TB | 8TB | 16TB |
Block 有一些基本限制,如下:
- Block 的大小和数量在格式化后无法改变。
- 一个 Block 只能存放一个文件的数据。
- 如果文件大于 Block 的大小,则一个文件会占用多个 Block。
- 如果文件小于 Block 的大小,则 Block 中多余的容量将无法再被使用。
Inode
上述,我们提到了一个大文件会占用多个 Block,那么,文件系统是如何判断哪些 Block 是属于同一个文件的呢?答案就是索引节点(index node,inode)。
Inode 主要用于 存储文件的属性元数据,其记录的信息包括:
- 文件的类型
- 文件的权限:read/write/execute
- 文件的拥有者:owner
- 文件的群组:group
- 文件的容量
- 文件的创建时间:ctime
- 文件的最近读取时间:atime
- 文件的最近修改时间:mtime
- 文件的内容指针:即指向属于文件的 Block 的指针
- ...
注意
Inode 并不包含文件名,文件名则存储在 目录项 中,详细信息可见下文。
根据 inode 中存储的文件内容指针,文件系统就能找到哪些 Block 是属于该文件的。
在高级格式化时,inode 的数量和大小就已经固定下来了,其大小一般为 128 byte 或 256 byte。同样,inode 也有一些基本限制,如下:
- 一个文件只会占用一个 inode。
- 文件系统支持的最大文件数量与 inode 的相关。
- 文件系统读取文件时,判断对应 inode 的权限与使用者是否符合,如果符合才能读取 Block 的数据。
如下所示为 ext2 中 inode 的数据结构定义。注意,inode
的定义并没有 inode id,那么这种情况下如何索引 inode
呢?关于这个问题,我们在 Inode Table 一节进行解释。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54/* linux/fs/ext2/ext2.h */
struct ext2_inode {
__le16 i_mode; /* File mode */
__le16 i_uid; /* Low 16 bits of Owner Uid */
__le32 i_size; /* Size in bytes */
__le32 i_atime; /* Access time */
__le32 i_ctime; /* Creation time */
__le32 i_mtime; /* Modification time */
__le32 i_dtime; /* Deletion Time */
__le16 i_gid; /* Low 16 bits of Group Id */
__le16 i_links_count; /* Links count */
__le32 i_blocks; /* Blocks count */
__le32 i_flags; /* File flags */
union {
struct {
__le32 l_i_reserved1;
} linux1;
struct {
__le32 h_i_translator;
} hurd1;
struct {
__le32 m_i_reserved1;
} masix1;
} osd1; /* OS dependent 1 */
__le32 i_block[EXT2_N_BLOCKS]; /* Pointers to blocks */
__le32 i_generation; /* File version (for NFS) */
__le32 i_file_acl; /* File ACL */
__le32 i_dir_acl; /* Directory ACL */
__le32 i_faddr; /* Fragment address */
union {
struct {
__u8 l_i_frag; /* Fragment number */
__u8 l_i_fsize; /* Fragment size */
__u16 i_pad1;
__le16 l_i_uid_high; /* these 2 fields */
__le16 l_i_gid_high; /* were reserved2[0] */
__u32 l_i_reserved2;
} linux2;
struct {
__u8 h_i_frag; /* Fragment number */
__u8 h_i_fsize; /* Fragment size */
__le16 h_i_mode_high;
__le16 h_i_uid_high;
__le16 h_i_gid_high;
__le32 h_i_author;
} hurd2;
struct {
__u8 m_i_frag; /* Fragment number */
__u8 m_i_fsize; /* Fragment size */
__u16 m_pad1;
__u32 m_i_reserved2[2];
} masix2;
} osd2; /* OS dependent 2 */
};
文件系统预留 Inode
Ext 文件系统预留了一部分 Inode 作为特殊用途,如下所示。
| Inode | 用途 |
|---|---|
| 0 | 不存在,可用于标识目录的 Data Block 中已删除的文件 |
| 1 | 虚拟文件系统,如:/proc、/sys |
| 2 | 根目录 |
| 3 | ACL 索引 |
| 4 | ACL 数据 |
| 5 | Boot Loader |
| 6 | 未删除的目录 |
| 7 | 预留的区块组描述符 Inode |
| 8 | 日志 Inode |
| 11 | 第一个非预留的 Inode,通常是
lost+fount 目录 |
区块组结构
Data Blocks
Data Blocks 包含了区块组中剩余的所有 Block。Block 的数量在高级格式化完成后就已经确定下来了。
Block Bitmap
Block Bitmap 用于标识区块组中所有的 Block 的使用状态,其使用 1 bit 来表示:0 表示空闲,1 表示占用。
区块组使用一个 Block 存储 Block Bitmap。如果 Block 的大小为 4K,那么其总共有 4 x 1024 x 8 = 32768 个比特位,可用于描述可使用的 Block。
注意,Block Bitmap 只在写数据时使用,因为只有写数据才需要找到空闲的 Block。
Inode Table
Inode Table 包含了区块组中所有的 Inode。Inode 的数量在高级格式化完成后就已经确定下来了。
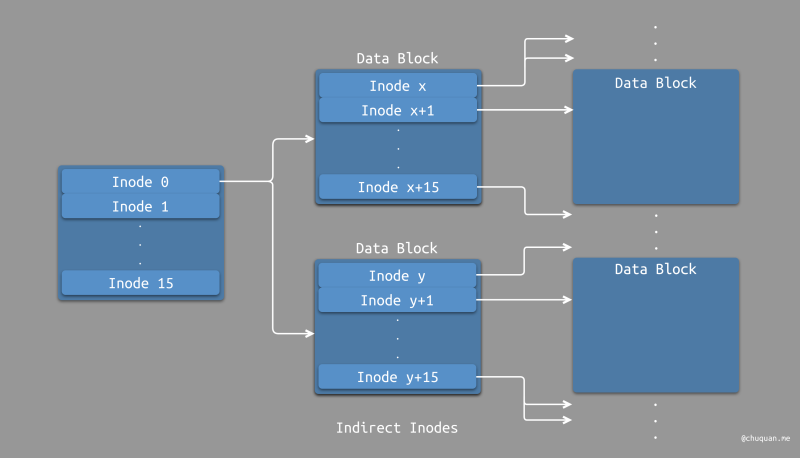
如果 Block 的大小为 4K 且 inode 的大小为 256 byte,那么一个 Block 可以存储 4 x 1024 / 256 = 16 个 inode。区块组中的 Inode Table 通过占用了多个连续的 Block,在逻辑上形成一张表记录了所有 inode,如下图所示。
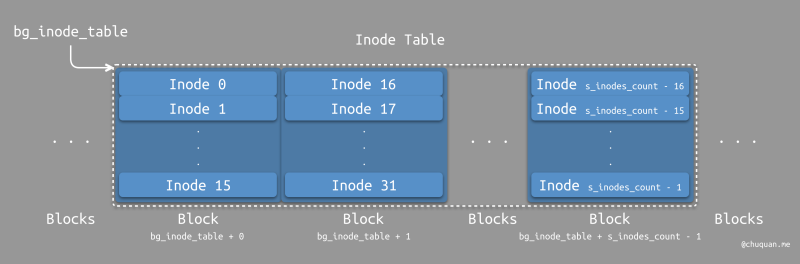
根据上述原理,当给定一个 inode id 时,我们只需要结合 inode 数据结构的大小,在这个 Inode Table 中查找到对应项即可找到对应的 inode。这也就解释了为什么 inode 没有 inode id 也能找到 inode 的原因。
Inode Bitmap
Inode Bitmap 用于标识区块组中所有的 inode 的使用状态,其使用 1 bit 来表示:0 表示空闲,1 表示占用。
区块组使用一个 Block 存储 Inode Bitmap。如果 Block 的大小为 4K,那么其总共有 4 x 1024 x 8 = 32768 个比特位,可用于描述可使用的 inode。
Group Descriptor Table
区块组使用组描述符来记录区块组的信息和属性元信息,如:Block
Bitmap、Inode Bitmap、Inode Table 等。如下所示为 ext2
中组描述符的数据结构定义。 1
2
3
4
5
6
7
8
9
10
11/* linux/fs/ext2/ext2.h */
struct ext2_group_desc {
__le32 bg_block_bitmap; /* Blocks bitmap block */
__le32 bg_inode_bitmap; /* Inodes bitmap block */
__le32 bg_inode_table; /* Inodes table block */
__le16 bg_free_blocks_count; /* Free blocks count */
__le16 bg_free_inodes_count; /* Free inodes count */
__le16 bg_used_dirs_count; /* Directories count */
__le16 bg_pad;
__le32 bg_reserved[3];
};
区块组使用连续的 Block 记录了文件系统中所有区块组的组描述符,从而在逻辑上形成一张表,即 Group Descriptor Table(简称 GDT),如下图所示。

这里会有一个疑问,为什么区块组中存储了一个描述整个文件系统区块组的信息?很多区块组都存储了内容重复的 GDT,这样是否会造成存储空间的浪费?其实这么做的原因是为了进行 备份,如果只在某片区域存储这部分信息,一旦这片存储区域出现了损坏,那么将导致整个文件系统无法使用并且无法恢复。
Super Block
类似于 GDT,Super Block 也是一个描述文件系统整体的数据结构,其存储在区块组中也是为了备份。
Super Block 是文件系统的核心,其保存了 文件系统的所有元数据,比如:
- Block 和 Inode 的总量
- 空闲/占用的 Block 和 Inode 的数量
- Block 和 Inode 的大小
- 文件系统的挂载时间
- 文件系统的最近写入时间
- ...
如下所示为 ext2 中 Super Block 的数据结构定义。 1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72/* linux/fs/ext2/ext2.h */
struct ext2_super_block {
__le32 s_inodes_count; /* Inodes count */
__le32 s_blocks_count; /* Blocks count */
__le32 s_r_blocks_count; /* Reserved blocks count */
__le32 s_free_blocks_count; /* Free blocks count */
__le32 s_free_inodes_count; /* Free inodes count */
__le32 s_first_data_block; /* First Data Block */
__le32 s_log_block_size; /* Block size */
__le32 s_log_frag_size; /* Fragment size */
__le32 s_blocks_per_group; /* # Blocks per group */
__le32 s_frags_per_group; /* # Fragments per group */
__le32 s_inodes_per_group; /* # Inodes per group */
__le32 s_mtime; /* Mount time */
__le32 s_wtime; /* Write time */
__le16 s_mnt_count; /* Mount count */
__le16 s_max_mnt_count; /* Maximal mount count */
__le16 s_magic; /* Magic signature */
__le16 s_state; /* File system state */
__le16 s_errors; /* Behaviour when detecting errors */
__le16 s_minor_rev_level; /* minor revision level */
__le32 s_lastcheck; /* time of last check */
__le32 s_checkinterval; /* max. time between checks */
__le32 s_creator_os; /* OS */
__le32 s_rev_level; /* Revision level */
__le16 s_def_resuid; /* Default uid for reserved blocks */
__le16 s_def_resgid; /* Default gid for reserved blocks */
/*
* These fields are for EXT2_DYNAMIC_REV superblocks only.
*
* Note: the difference between the compatible feature set and
* the incompatible feature set is that if there is a bit set
* in the incompatible feature set that the kernel doesn't
* know about, it should refuse to mount the filesystem.
*
* e2fsck's requirements are more strict; if it doesn't know
* about a feature in either the compatible or incompatible
* feature set, it must abort and not try to meddle with
* things it doesn't understand...
*/
__le32 s_first_ino; /* First non-reserved inode */
__le16 s_inode_size; /* size of inode structure */
__le16 s_block_group_nr; /* block group # of this superblock */
__le32 s_feature_compat; /* compatible feature set */
__le32 s_feature_incompat; /* incompatible feature set */
__le32 s_feature_ro_compat; /* readonly-compatible feature set */
__u8 s_uuid[16]; /* 128-bit uuid for volume */
char s_volume_name[16]; /* volume name */
char s_last_mounted[64]; /* directory where last mounted */
__le32 s_algorithm_usage_bitmap; /* For compression */
/*
* Performance hints. Directory preallocation should only
* happen if the EXT2_COMPAT_PREALLOC flag is on.
*/
__u8 s_prealloc_blocks; /* Nr of blocks to try to preallocate*/
__u8 s_prealloc_dir_blocks; /* Nr to preallocate for dirs */
__u16 s_padding1;
/*
* Journaling support valid if EXT3_FEATURE_COMPAT_HAS_JOURNAL set.
*/
__u8 s_journal_uuid[16]; /* uuid of journal superblock */
__u32 s_journal_inum; /* inode number of journal file */
__u32 s_journal_dev; /* device number of journal file */
__u32 s_last_orphan; /* start of list of inodes to delete */
__u32 s_hash_seed[4]; /* HTREE hash seed */
__u8 s_def_hash_version; /* Default hash version to use */
__u8 s_reserved_char_pad;
__u16 s_reserved_word_pad;
__le32 s_default_mount_opts;
__le32 s_first_meta_bg; /* First metablock block group */
__u32 s_reserved[190]; /* Padding to the end of the block */
};
文件存储
在了解了文件系统的底层结构之后,我们再来看看不同类型的文件在文件系统中是如何存储的。
普通文件存储
在讨论普通文件存储时,我们可以根据普通文件大小分为两种类型:
- 小文件存储:占用 Block 数量小于
EXT2_N_BLOCKS - 大文件存储:占用 Block 数量大于
EXT2_N_BLOCKS
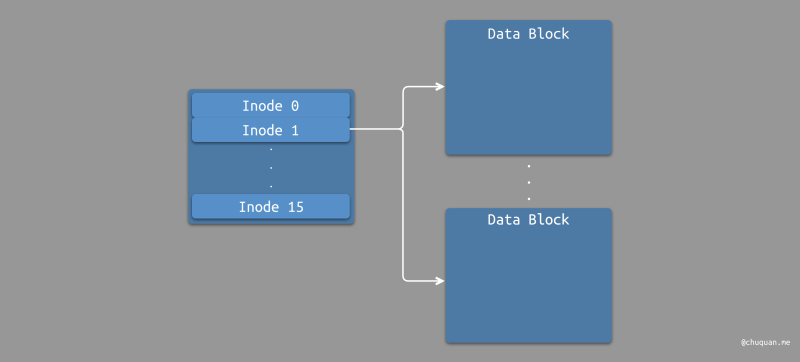
对于小文件存储,其基本原理是:根据 inode 的 i_block[]
数组中保存的 Block 指针(Block 序号),找到对应所有的 Block
即可,如下所示。
对于大文件存储,由于一个 inode 可引用的 Block 数量的上限是
EXT2_N_BLOCKS,因此可以使用 Data Block 存储间接的
inode,从而扩大最终可引用的 Block 数量,如下所示。
目录文件存储
目录文件的 内容数据 是由一系列 目录项 组成。Ext2 文件系统中目录项的数据结构定义如下所示:
1 | // linux/include/linux/ext2_fs.h |
每一个目录项定义了一个文件所对应的 inode 序号、目录项长度、文件名长度、文件类型等。关于文件类型,ext2 定义了以下这些文件类型。
| 编码 | 文件类型 |
|---|---|
| 0 | Unknown |
| 1 | Regular File |
| 2 | Director |
| 3 | Character Device |
| 4 | Block Device |
| 5 | Named Pipe |
| 6 | Socket |
| 7 | Symbolic Link |
以一个 test 目录文件为例,其包含以下这些文件。
1 | $ ls -la test/ |
test 目录文件在文件系统中的 内容数据
的存储如下所示。
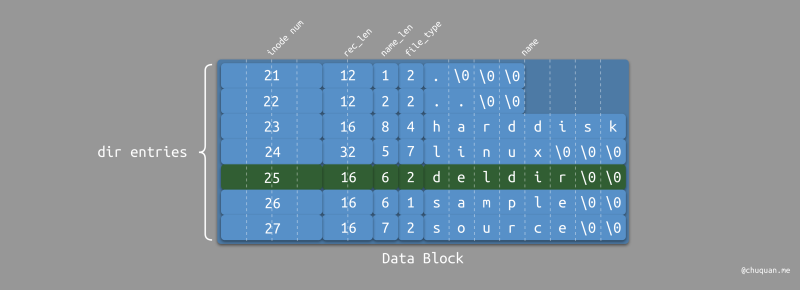
这里需要重点注意是 rec_len,rec_len 表示
从当前目录项的 rec_len 末尾开始,到下一个目录项的
rec_len
末尾结束的偏移量字节数。当文件系统从目录文件中删除某一个子目录时,比如
deldir
目录,这时候并不会删除对应的目录项,仅仅是修改删除项之前目录项的
rec_len 值,从而使得文件系统在扫描目录内容时,跳过
deldir 目录项。这也是为什么图中 deldir
之前的目录项的 rec_len 为 32。
软链接存储
软链接,即符号链接,类似于 Windows 操作系统中的快捷方式,它的作用是指向原文件或目录。
软链接一般情况下不占用 Data Block,仅仅通过它对应的 inode 完成信息记录,只有当目标路径占用的字符数超过 60 字节时,文件系统才会分配一个 Data Block 来存储目标路径。
注意,软链接的 Data Block 存储的是
目标文件名,比如:nox -> /Users/baochuquan/Develop/nox/nox.sh
中 /Users/baochuquan/Develop/nox/nox.sh 即目标路径。
硬链接存储
通过上文,我们知道目录项存储了 inode 序号、文件名等信息。假如,有两个目录项存储了不同的文件名,但它们的 inode 序号却相同,这会是一种什么样的情况呢?事实上,这就是硬链接,即 inode 相同的文件。
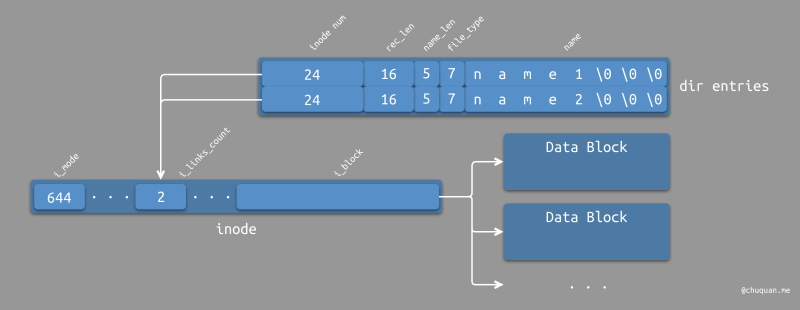
与编程语言中的引用计数类似,inode 也是用一个字段
i_links_count 来记录其被引用的数量。
- 当创建一个文件的硬链接时,对应的 inode 的链接数会加 1;
- 当删除一个文件时,如果对应的 inode 的链接数大于 1 时,则仅仅对链接数进行减 1 操作;如果对应的 inode 的链接数等于 1 时,则会删除 inode 中的 Block 指针。
目录的硬链接数量
在创建目录的同时,文件系统会为它创建两个目录:. 和
..,分别对应当前目录的硬链接、上级目录的硬链接。因此,每一个目录都会包含这两个硬链接,它包含了两个信息:
- 一个不包含子目录的目录文件,其硬链接数量为 2。其一是目录本身,即目录
Data Block 中的
.;其二是父级目录 Data Block 中该目录的目录项。 - 一个包含子目录的目录文件,其硬链接数量为 2 +
子目录数。因为每一个子目录都关联一个父级目录的硬链接
..。
文件系统会自动为目录创建硬链接,该权限未对用户开放,用户无法对目录创建硬链接。因此,硬链接只能对文件创建。
文件操作
文件读取
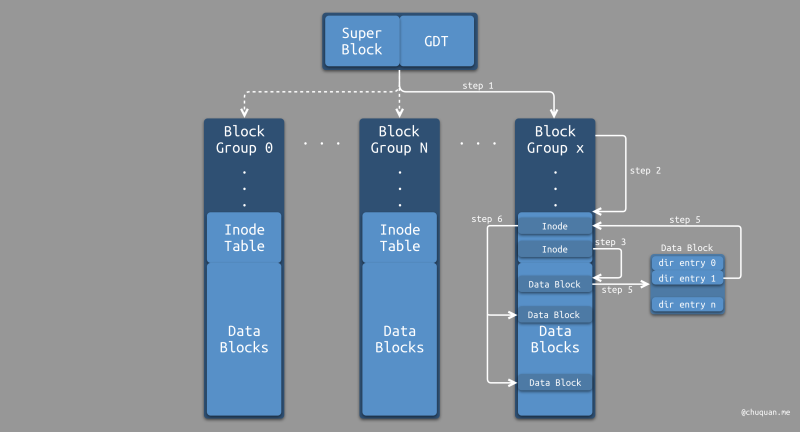
关于文件读取,可以分为两个部分:首先,找到父级目录中关于目标文件的元信息;然后,根据目标文件的元信息找到目标文件的内容数据。整体可以分为如下几个步骤:
- step 1:根据 Super Block 和 GDT 找到目标文件的父级目录的区块组
- step 2:根据区块组描述符找到区块组中的 Inode Table
- step 3:根据 Inode 序号,从 Inode Table 中找到父级目录的 Inode
- step 4:根据 Inode 找到父级目录 Data Block
- step 5:遍历父级目录的 Data Block 中的目录项,找到与目标文件名匹配的目录项
- step 6:根据目录项中的 Inode 序号,找到目标文件的 Data Block
下面,我们以 cat /var/log/message
命令为例,来介绍一下其具体过程。
文件系统在查找 /var/log/message 时,会将它转换成 4
个类似的步骤,逐步完成。这 4 个阶段分别是:
- 查找根目录
/ - 查找
/目录下的var子目录 - 查找
/var目录下的log子目录 - 查找
/var/log目录下的message文件
在详细介绍这 4 个阶段之前,我们需要知道一个前提:在操作系统启动后, 操作系统会挂载根文件系统,此时 Super Block 和 GDT 会被加载至内存之中。
查找根目录
上文,我们提到文件系统预留了一些 inode 序号,其中根目录
/ 的 inode 序号为 2。因此,可以根据 Super Block
的参数定位到 inode 所在的区块组,结合 GDT
获取到区块组的元信息,即区块描述符。
根据区块描述符,找到对应的 Inode Table,从而定位到具体的
inode,并根据 i_blocks[] 数组,找到对应的 Data Block。
此时,我们获取到了根目录 / 的所有信息。
查找 var 目录
获取到了根目录 / 的 Data Block
之后,我们可以遍历其中的目录项 dir entry,找到文件名与
var 匹配的目录项。根据目录项中的 inode 序号,结合 Super
Block 和 GDT,依次定位到区块组、Inode Table、Inode、Data Block。
此时,我们获取到了 /var 目录的所有信息。
查找 log 目录
获取到了 /var 目录的 Data Block
之后,我们可以遍历其中的目录项,找到文件名与 log
匹配的目录项。根据目录项中的 inode 序号,结合 Super Block 和 GDT,与查找
var 目录一样,也能够定位到区块组、Inode Table、Inode、Data
Block。
此时,我们获取到了 /var/log 目录的所有信息。
查找 message 文件
获取到了 /var/log 目录的 Data Block
之后,我们可以遍历其中的目录项,找到文件名与 message
匹配的目录项。根据目录项中的 inode 序号,结合 Super Block 和
GDT,我们最终就能找到文件内存数据所存放的一组 Data Block 中。
文件删除
关于文件的删除,我们分别介绍一下 普通文件 和 目录文件 的删除操作。
普通文件删除
对于普通文件删除,其大致可分为以下几个步骤:
- step 1:找到目标文件 Inode 和 Data Block
- step 2:将 Inode Table 中对应 Inode 中的 Data Block 指针删除(位于
i_blocks[]中) - step 3:在 Inode Bitmap 中,将对应 Inode 标记为未使用
- step 4:找到目标文件的父级目录的 Data
Block,将与目标文件匹配的目录项删除。具体做法是:
- 修改对应目录项的 inode 序号设置为 0
- 修改前一个目录项的
rec_len,使文件系统在扫描时能够跳过被删除的目录项
- step 5:在 Block Bitmap 中,将对应的 Block 标记为未使用
目录文件删除
对于目录文件删除,其大致可分为以下几个步骤:
- step 1:找到目录及其目录下的所有文件、子目录、子文件的 Inode 和 Data Block
- step 2:在 Inode Bitmap 中,将所有对应的 Inode 标记为未使用
- step 3:在 Block Bitmap 中,将所有对应的 Block 标记为未使用
- step 4:找到目标目录的父级目录的 Data Block,将与目标目录匹配的目录项删除。
相比而言,目录文件删除时,需要将子目录和子文件全部删除。
文件重命名
关于文件的重命名,我们分别介绍一下 同目录内 和 非同目录内 的重命名操作。
同目录内重命名
同目录内重命名,其仅仅是找到目录的 Data Block 中对应的目录项,并将原始文件名修改为目标文件名。
非同目录内重命名
非同目录内重命名,本质上就是文件移动操作。具体细节,见下一节。
文件移动
文件移动,可分两种情况讨论,分别是 目标路径下有同名文件 和 目标路径下无同名文件。
假设,我们要将执行 mv /origin/file /target/file
操作。
如果目标路径下有同名文件,文件移动操作可以分为两部分:
- 找到
/origin目录的 Data Block,将file文件的目录项删除。 - 找到
/target目录的 Data Block,将同名文件file的目录项的 inode 序号修改为新的 inode 序号。
如果目标路径下无同名文件,文件移动操作也可以分为两部分:
- 找到
/origin目录的 Data Block,将file文件的目录项删除。 - 找到
/target目录的 Data Block,新增一个file文件的目录项。
文件移动本质上就是修改了文件的目录项中 Inode 的指针或新增目录项,因此速度非常快。
多文件系统
上文所有的内容的前提都是在一个文件系统内完成的,下面,我们在来讨论一下多文件系统的相关内容。
根文件系统
任何一个文件系统要在 Linux 中正常使用,必须挂载到一个以挂载的文件系统的某个目录下。
类似于一棵多叉树,操作系统也会有一个根文件系统。根文件系统下某个目录如果挂载了某个文件系统,该目录节点被称为 一级挂载点;如果这个挂载的文件系统下的某个目录又挂载了某个文件系统,该目录节点被称为 二级挂载点。以此类推。
举个例子,如果 /dev/sdb1 挂载至根文件系统的
/mydata 目录下,那么 /mydata 就是
一级挂载点;如果 /dev/cdrom 又挂载至
/dev/sdb1 文件系统的 /mydata/cdrom
目录下,那么 /mydata/cdrom 就是
二级挂载点。
文件系统挂载
关于文件系统挂载,我们以 mount /dev/cdrom /mnt
为例,进行介绍。
在文件系统 /dev/cdrom 挂载至挂载点 /mnt
之前,/mnt 是根文件系统的一个目录,其父级目录
/ 的 Data Block 中存储了 /mnt
文件对应的目录项,其中包含了文件元信息,如:Inode 序号、文件名等。
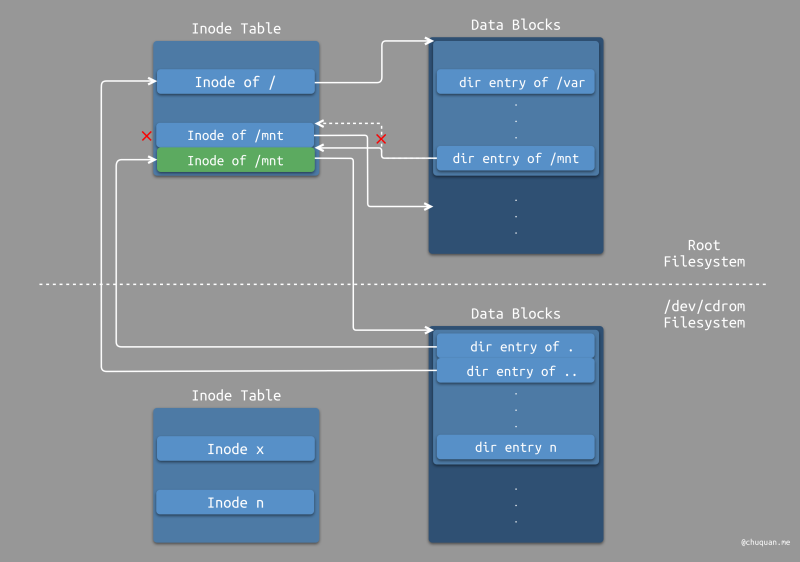
当文件系统 /dev/cdrom 挂载至挂载点 /mnt
之后,/mnt
变成了另一个文件系统的入口。对于挂载,操作系统具体做了以下这些内容。
- 在根文件系统的 Inode Table 中,新增一个 Inode 指向文件系统
/dev/cdrom中的 Data Block。 - 找到根文件系统的
/目录的 Data Block,将/mnt对应的目录项的 Inode 序号修改为新增的 Inode 序号。 - 在根文件系统的 Inode Table 中,将原始的
/mnt的 Inode 标记为暂不可用。
如下所示,为文件系统挂载操作的示意图。文件系统挂载完成后,挂载点的元数据和内容数据分别存储在不同的文件系统中。
文件系统卸载
关于文件系统卸载,其本质就是挂载的还原操作,它会移除新增的 Inode,并将指针指向原来的 Data Block。同时挂载点所对应的目录项的 Inode 指针也会恢复原来的设置。
总结
本文,我们通过 Linux 的 Ext 文件系统,介绍了经典文件系统的底层设计原理。由于各种文件系统的设计其实大同小异,通过本文我们能够举一反三,了解文件系统的设计。
文件系统的很多细节设计都采用了分层设计的思想,比如:采用区块组分层管理底层数据,采用 Inode 和 Block 分别管理元数据和内容数据等。
此外,文件系统的目录项设计也是能够极大提升性能的,很多文件操作仅仅通过操作目录项就可以实现最终的目的。
后续,我们再来探讨一下具体文件系统的上层——虚拟文件系统的实现。
参考
- linux
- Disk formatting
- Overview of the Linux Virtual File System
- 《Linux 内核设计与实现》
- 《深入 Linux 内核架构》
- 5分钟让你明白“软链接”和“硬链接”的区别
- 《鸟哥的 Linux 私房菜:基础学习篇》
- A tour of the Linux VFS
- SSD 固态硬盘是分区好还是不分区好?
- 第4章 ext文件系统机制原理剖析
- 《UNIX 环境高级编程》